


Matek AP_Periph DroneCAN to PWM Adapter
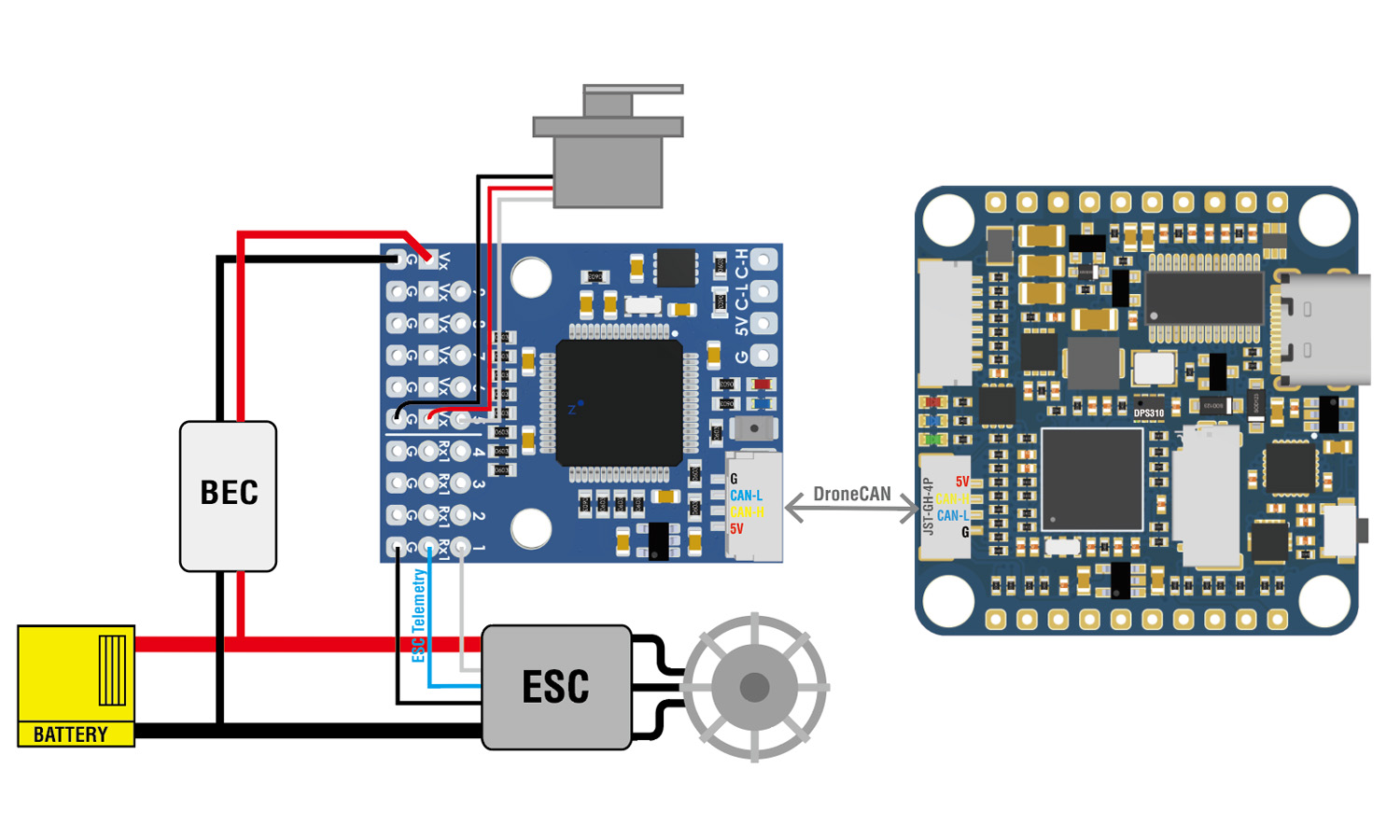
The Matek CAN-L4-PWM Adapter Node enhances unmanned vehicles by converting DShot capable electronic speed controllers (ESCs) to DroneCAN-supported ESCs and PWM servos to CAN servos. This compact adapter, featuring nine PWM outputs and full ESC telemetry support, allows for streamlined communication and telemetry feedback from ESCs when connected via CAN bus protocol.
Check out all of our Matek Products!
- CAN-L4-PWM is an Adapter Node based on ArudPilot AP_Periph firmware.
- Using this adapter to turn DShot capable ESCs into CAN ESCs, including full ESC telemetry. and turn PWM servos into CAN servos.
Specifications
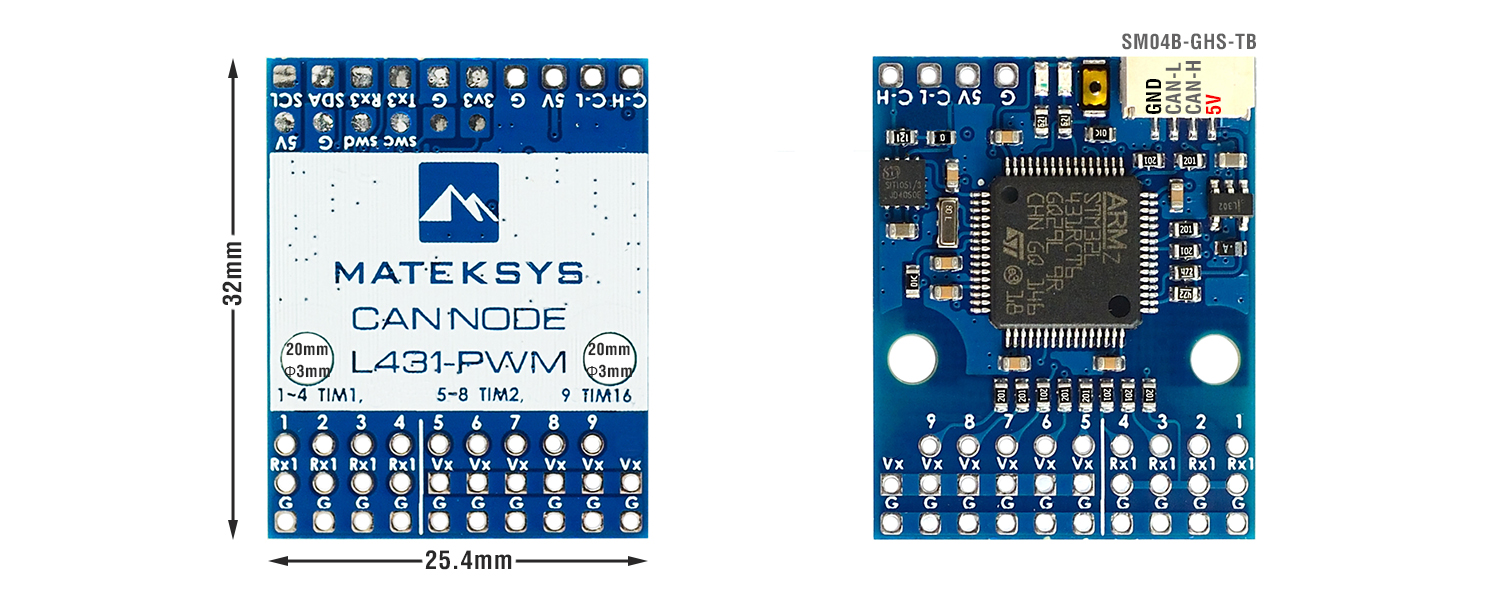
- MCU: STM32L431xC, 256KB Flash
- 1x CAN, DroneCAN Protocol
- 9x PWM outputs (8x Dshot)
- 1.5x UARTs
- UART1, RX1
- UART3, Tx3/ Rx3
- ST debug, SWCLK & SWDIO
- LED
- Blue, Fast blinking, Booting
- Blue, Slow blinking, working
- Red, 3.3V indicator
- Input voltage range: 4.5~5.5V @5V pad/pin
- Power consumption: 30mA
- Operating Temperatures: -20~80 °C
- “Vx” pads are for powering servos via external BEC. “Vx” is not connected to other components on this board.
- “Rx1” pads are for ESC Telemetry, DO NOT connect ESC BEC output to Rx1 pad.
- Physical
- 1x JST-GH-4P(SM04B-GHS-TB) for CAN
- Board Size: 32mm*25.4mm. 3.5g
- Mounting: 20mm. Dia.3mm
- 3D file : CAN-L4-PWM_STEP.zip
- Firmware
- ArduPilot AP_Periph MatekL431-Dshot
- Update via DroneCAN GUI Tool
Packing
- 1x CAN-L4-PWM board
- 1x JST-GH-4P to JST-GH-4P 20cm silicon wire